- English
- Español
- Português
- русский
- Français
- 日本語
- Deutsch
- tiếng Việt
- Italiano
- Nederlands
- ภาษาไทย
- Polski
- 한국어
- Svenska
- magyar
- Malay
- বাংলা ভাষার
- Dansk
- Suomi
- हिन्दी
- Pilipino
- Türkçe
- Gaeilge
- العربية
- Indonesia
- Norsk
- تمل
- český
- ελληνικά
- український
- Javanese
- فارسی
- தமிழ்
- తెలుగు
- नेपाली
- Burmese
- български
- ລາວ
- Latine
- Қазақша
- Euskal
- Azərbaycan
- Slovenský jazyk
- Македонски
- Lietuvos
- Eesti Keel
- Română
- Slovenski
- मराठी
- Srpski језик

Anti-Adhesion Frame-type Automatic Loading และ Unloading Machine สำหรับเพลต
เมื่อชิ้นงานเฟอร์นิเจอร์ถูกโหลดในพาเลททั้งหมดเนื่องจากการซึมผ่านของอากาศของวัสดุระดับของความพอดีระหว่างชิ้นงาน
และการยึดเกาะของกาวที่ขอบหุ่นยนต์อาจทำให้เกิดการยึดเกาะร่วมกันเมื่อคว้าชิ้นงาน:
เป้าหมายคือการคว้าชิ้นงานหนึ่งชั้น แต่ในความเป็นจริงมันอาจคว้า 3-4 ชั้นได้มากที่สุด
สิ่งนี้จะทำให้เกิดผลกระทบด้านลบและลดความน่าเชื่อถือของการดำเนินการอุปกรณ์อย่างมาก
อุปกรณ์มีข้อกำหนดสูงสำหรับแผ่นที่จะโหลด: ยิ่งวางแผ่นที่ยาวขึ้นเท่าใดความพอดีระหว่างแผ่น
และยิ่งง่ายขึ้นเท่านั้น ความสะอาดของแผ่นและกาวตกค้างที่ขอบอาจทำให้การยึดเกาะกันระหว่างแผ่นกันซ้ำ
ความน่าเชื่อถือในการปฏิบัติงานของอุปกรณ์นั้นไม่ดี
ปัญหาที่เกิดจากการยึดเกาะร่วมกันระหว่างเพลตจำเป็นต้องมีการปิดและการแทรกแซงด้วยตนเองและสถานการณ์นี้เกิดขึ้นบ่อยครั้ง
มีความเสี่ยงด้านความปลอดภัยสูง: ความผิดปกติบ่อยครั้งจำเป็นต้องมีบุคลากรในการเข้าและออกจากพื้นที่ทำงานของหุ่นยนต์ซึ่งมีความเสี่ยงด้านความปลอดภัยที่ดี
วงจรการคว้าถ้วยดูดไม่ได้รับการแก้ไข: ความสูงของตารางสำหรับการปล่อยแผ่นได้รับการแก้ไข แต่เมื่อคว้า
แผ่นจะถูกจับเลเยอร์โดยเลเยอร์จากแต่ละพาเลทและความสูงจะลดลงเรื่อย ๆ ซึ่งเปลี่ยนแปลงอยู่ตลอดเวลา
ดังนั้นจึงจำเป็นต้องทำการวิจัยและพัฒนาอุปกรณ์การให้อาหารอัตโนมัติแบบเชื่อมโยงรูปแบบใหม่เพื่อป้อนแผ่นเพื่อเจาะเพื่อตอบสนองต่อปัญหาข้างต้นอย่างแม่นยำ
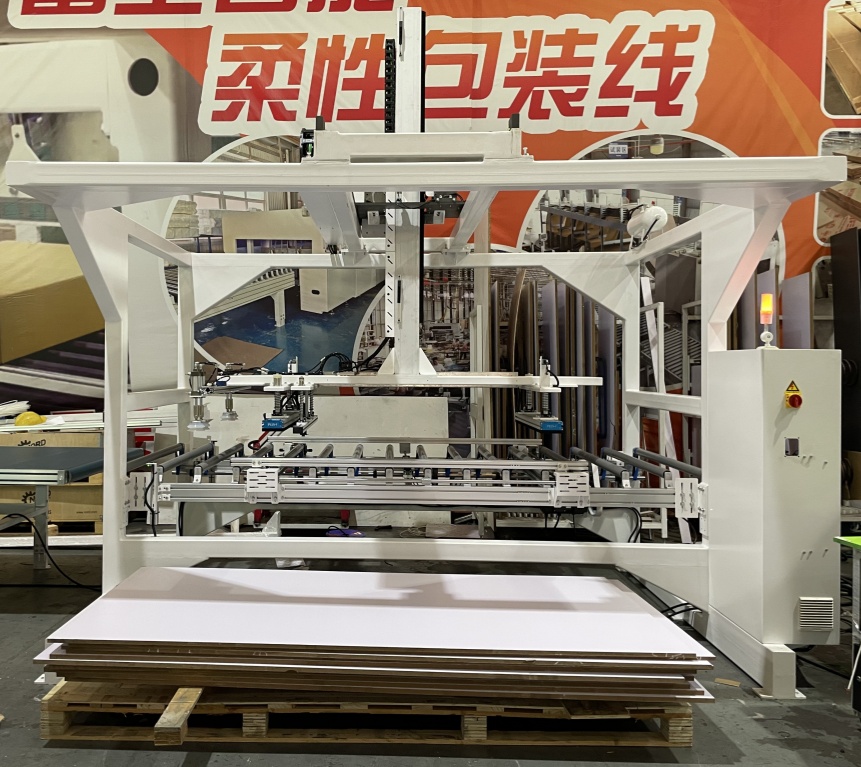

เวิร์กโฟลว์ของการโหลดเฟรมแบบต่อต้านการยึดติดแบบเฟรมอัตโนมัติและเครื่องขนถ่ายในสายการผลิตแผงไม้ที่ทำจากไม้
1. การเตรียมการ: คนงานวางพาเลททั้งหมดของแผงไม้ที่ผ่านการแปรรูปบนชั้นวางอาหารของอุปกรณ์ แพลตฟอร์มการยกของชั้นวางจะปรับความสูงเริ่มต้นโดยอัตโนมัติ
2. การวางตำแหน่งและการคว้า: หุ่นยนต์ตั้งสิ่งของขับเคลื่อนกลไกการคว้าเพื่อเคลื่อนที่เหนือแผงโดยตรง กล้องอุตสาหกรรมตั้งตำแหน่งของแผง
ถ้วยดูดลงมาเพื่อสัมผัสกับพื้นผิวแผงและโมดูลต่อต้านการยึดเกาะจะถูกเปิดใช้งานพร้อมกัน
3. การตรวจจับการยึดติด: เซ็นเซอร์ความตึงตรวจจับโหลด หลังจากยืนยันว่ามีการจับแผงชั้นเดียวเพียงชั้นเดียวแล้วถ้วยดูดรูปแผ่นดิสก์ขนาดเล็กสี่ตัวติดอยู่ที่ปลายด้านหนึ่งของแผง
และเขย่าอย่างรุนแรงขึ้นและลงสองสามวินาทีเพื่อให้แน่ใจว่าแผงยึดติดเพิ่มเติมใด ๆ จะถูกเขย่าออก จากนั้นหุ่นยนต์จะเคลื่อนที่ไปตามรางนำไปยังพอร์ตการให้อาหารของอุปกรณ์ประมวลผล
4. การขนถ่ายอย่างแม่นยำ: เมื่อแผงถูกส่งไปยังตำแหน่งที่กำหนดของอุปกรณ์ประมวลผลถ้วยดูดจะปล่อยสูญญากาศเพื่อให้กระบวนการโหลดเสร็จสมบูรณ์ ในเวลาเดียวกัน
อีกชุดหนึ่งของกลไกการคว้าแบบซิงโครนัสจะนำแผงประมวลผลออกจากอุปกรณ์และถ่ายโอนไปยังสายการขนถ่ายสายพานลำเลียง
5. การดำเนินการทางไซเบอร์: แพลตฟอร์มการยกของชั้นวางอาหารค่อยๆเพิ่มขึ้นอย่างค่อยเป็นค่อยไปเมื่อการคว้าดำเนินไปเพื่อให้ความสูงของพื้นผิวคว้ามีเสถียรภาพ เมื่อแผงทั้งหมดบนพาเลทได้รับการประมวลผล
อุปกรณ์ออกพร้อมกับการเปลี่ยนแปลงวัสดุ